Research
I'm interested in robot learning.
|
|
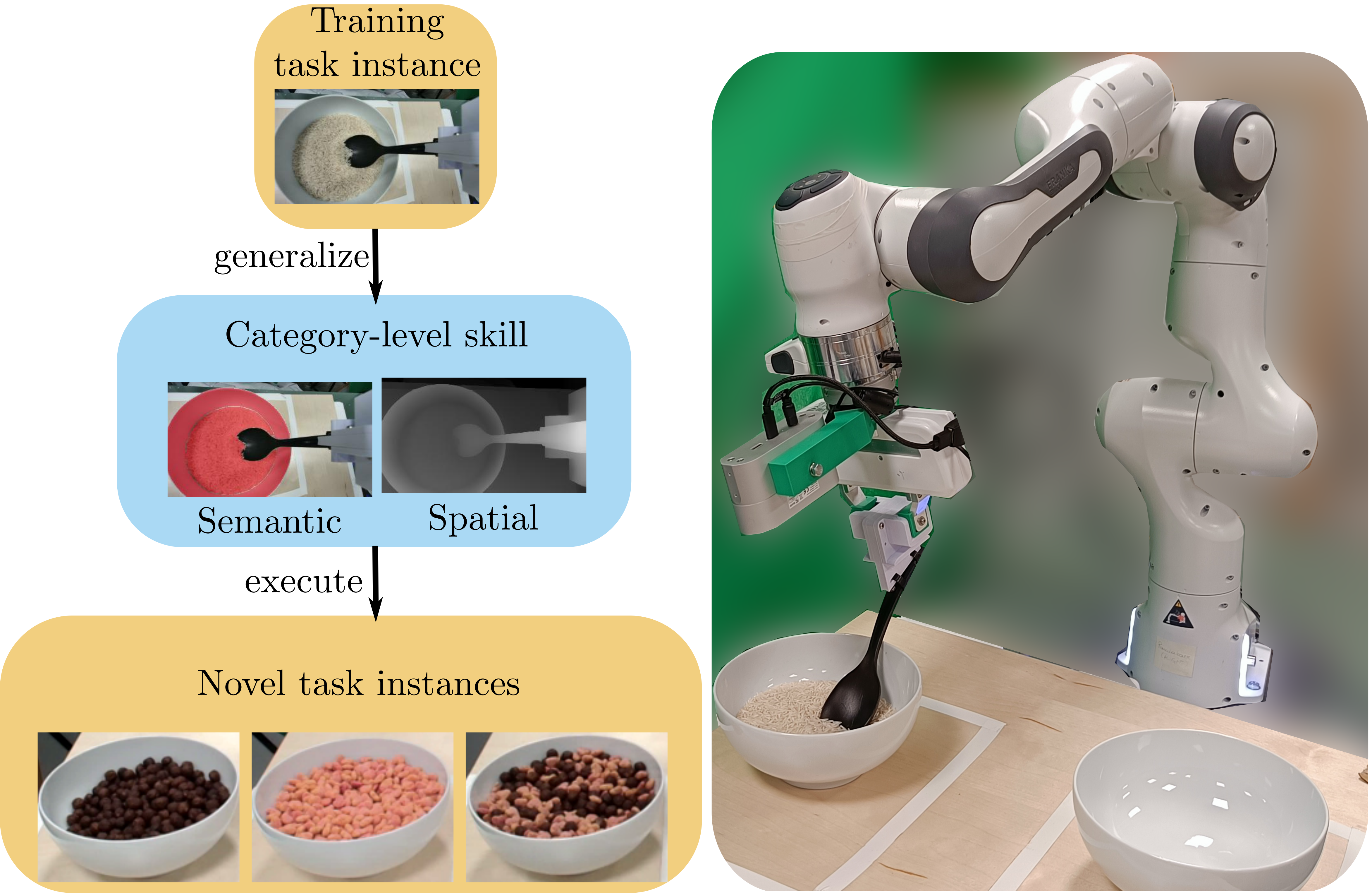
S2-Diffusion: Generalizing from Instance-level to Category-level Skills in Robot Manipulation
Quantao Yang, Michael C. Welle, Danica Kragic, Olov Andersson
IEEE Robotics and Automation Letters (RA-L), 2025
Project
Paper
|
|
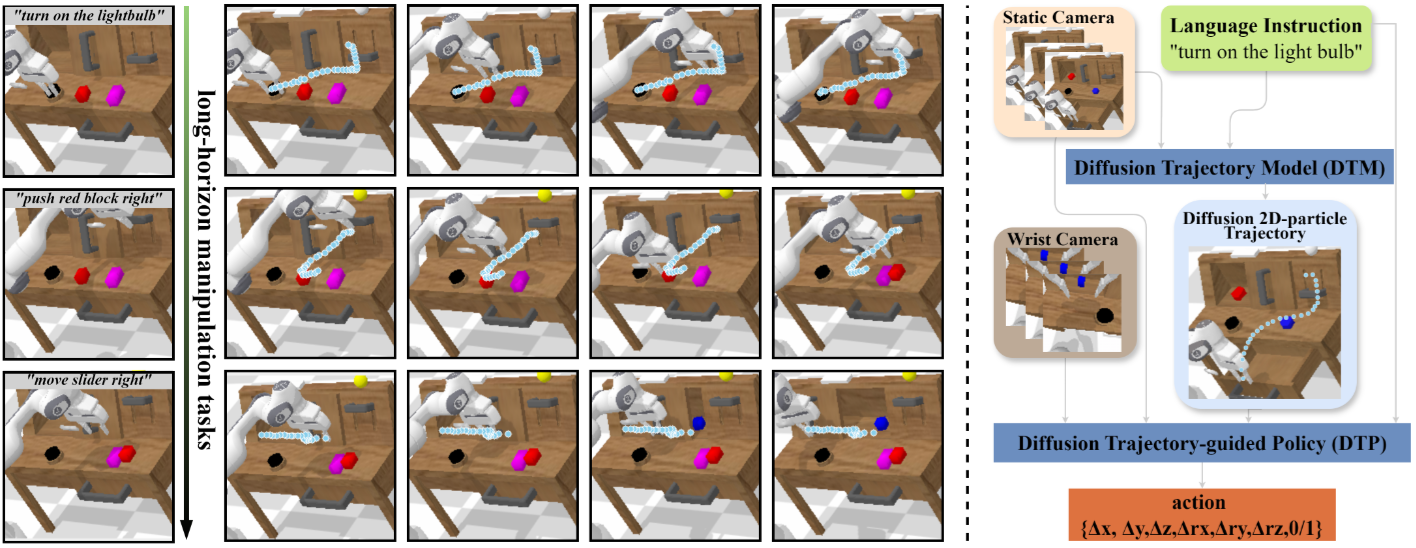
Diffusion Trajectory-guided Policy for Long-horizon Robot Manipulation
Shichao Fan, Quantao Yang, Yajie Liu, Kun Wu, Zhengping Che, Qingjie Liu, Min Wan
IEEE Robotics and Automation Letters (RA-L), 2025
Project
Paper
|
|
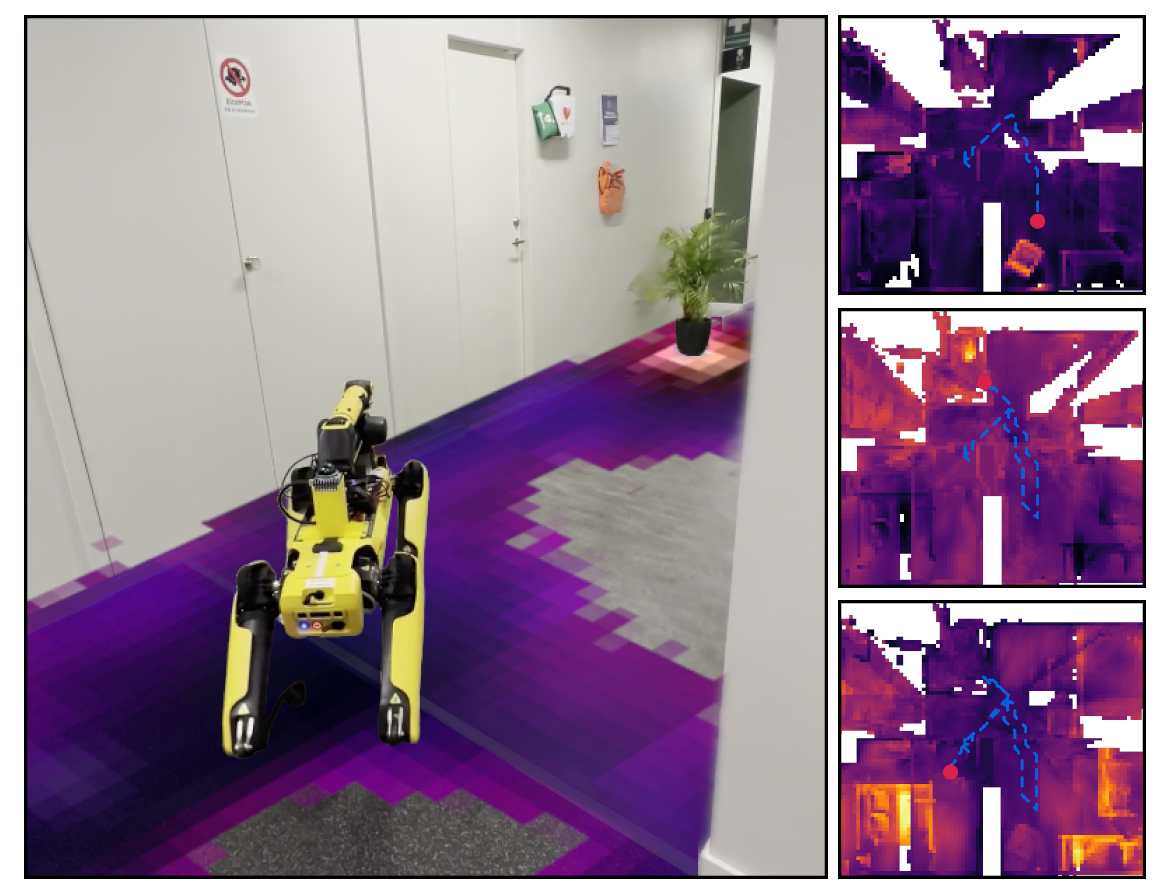
One Map to Find Them All: Real-time Open-Vocabulary Mapping for Zero-shot Multi-Object Navigation
Finn Busch, Timon Homberger, Jesús Ortega-Peimbert, Quantao Yang, Olov Andersson
IEEE International Conference on Robotics and Automation (ICRA), 2025
Project
Paper
Code
|
|
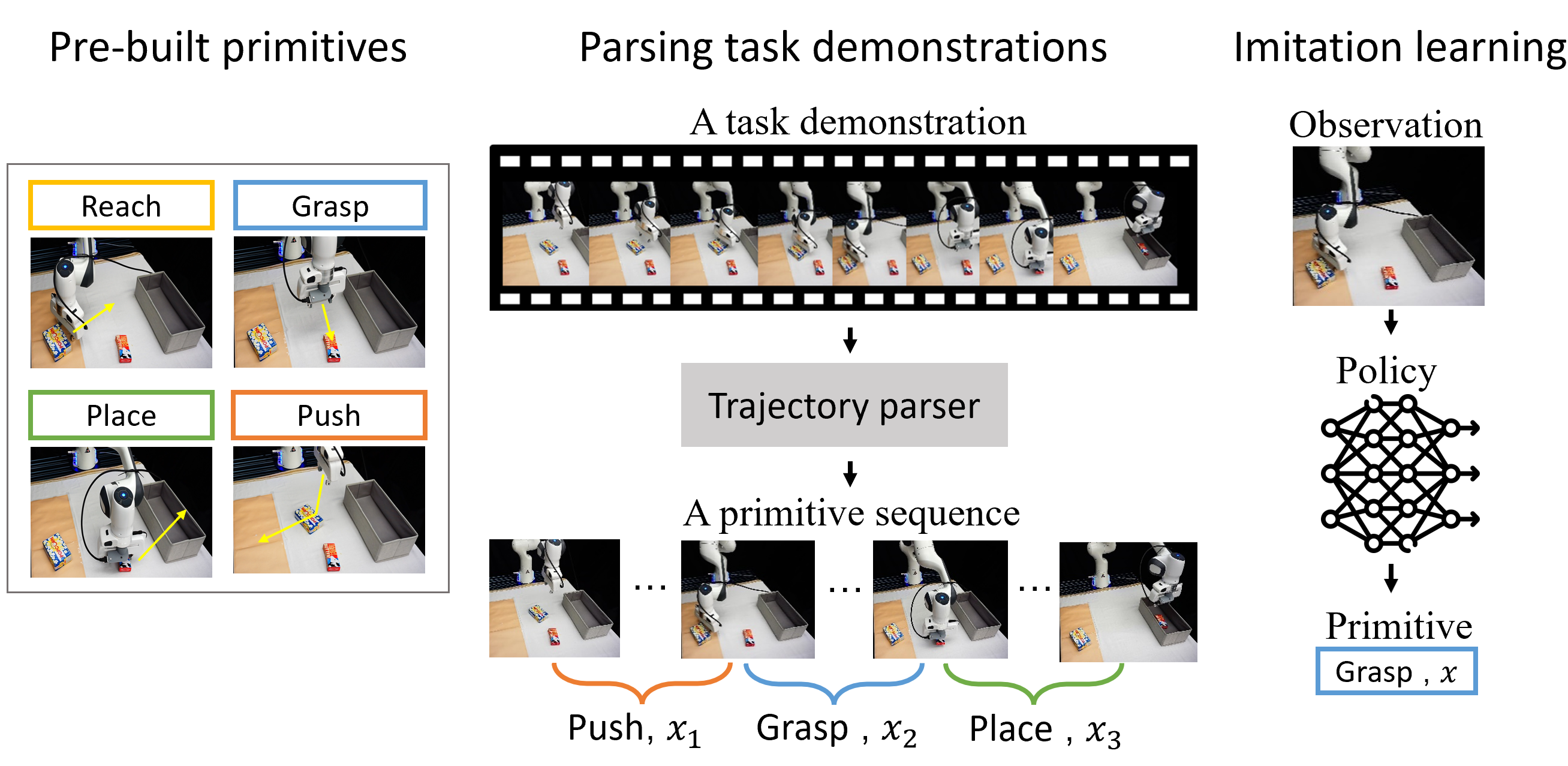
PRIME: Scaffolding Manipulation Tasks with Behavior Primitives for Data-efficient Imitation Learning
Tian Gao, Soroush Nasiriany, Huihan Liu, Quantao Yang, Yuke Zhu
IEEE Robotics and Automation Letters (RA-L), 2024
Project
Paper
Code
|
|
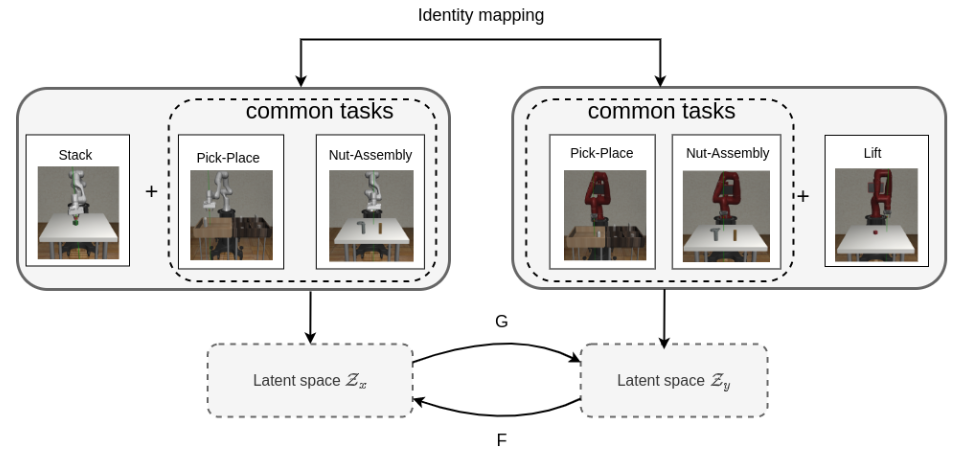
Learn from Robot: Transferring Skills for Diverse Manipulation via Cycle Generative Networks
Quantao Yang, Johannes Andreas Stork, Todor Stoyanov
IEEE International Conference on Automation Science and Engineering (CASE), 2023
Paper
|
|
Variable Impedance Skill Learning for Contact-rich Manipulation
Quantao Yang, Alexander Dürr, Elin Anna Topp, Johannes Andreas Stork, Todor Stoyanov
IEEE Robotics and Automation Letters (RA-L), 2022
Paper
|
|
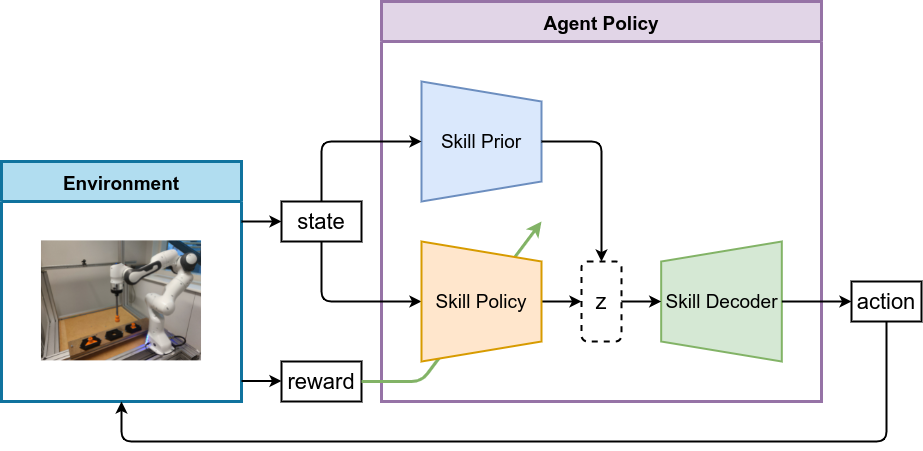
MPR-RL: Multi-Prior Regularized Reinforcement Learning for Knowledge Transfer
Quantao Yang, Johannes Andreas Stork, Todor Stoyanov
IEEE Robotics and Automation Letters (RA-L), 2022
Paper
|
|
Null Space Based Efficient Reinforcement Learning with Hierarchical Safety Constraints
Quantao Yang, Johannes Andreas Stork, Todor Stoyanov
IEEE European Conference on Mobile Robots (ECMR), 2021
Paper
|
Service
Reviewer for RAL, TMech, ICRA, IROS, CoRL
|
|
